Микрофон для Arduino – не просто датчик звука, а инструмент для анализа акустических сигналов в реальном времени. Чаще всего используют электретные микрофоны с предусилителем, например, MAX4466 или LM393, так как они обеспечивают достаточную чувствительность (от -44 дБ) и работают в диапазоне 20 Гц–20 кГц. Для базовых задач подойдет и простой модуль KY-037, но его аналоговый выход требует дополнительной фильтрации шумов.
Перед подключением определитесь с задачей: аналоговый сигнал (для измерения громкости) или цифровой (для детекции пороговых значений). Для аналогового режима потребуется АЦП Arduino (разрешение 10 бит, диапазон 0–1023), а для цифрового – настройка прерывания по фронту сигнала. Учтите, что электретные микрофоны требуют питания 3,3–5 В, а модули с предусилителем часто имеют регулируемый коэффициент усиления (например, MAX4466 – до 125x).
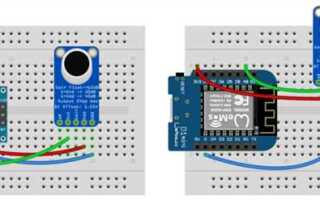
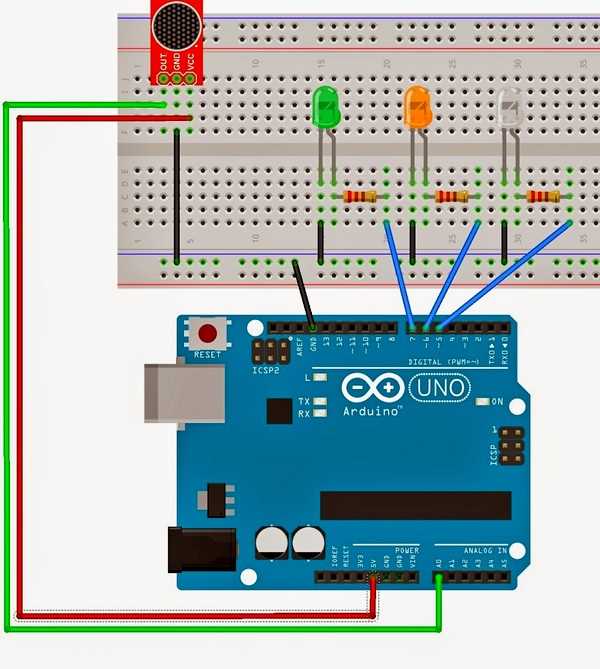
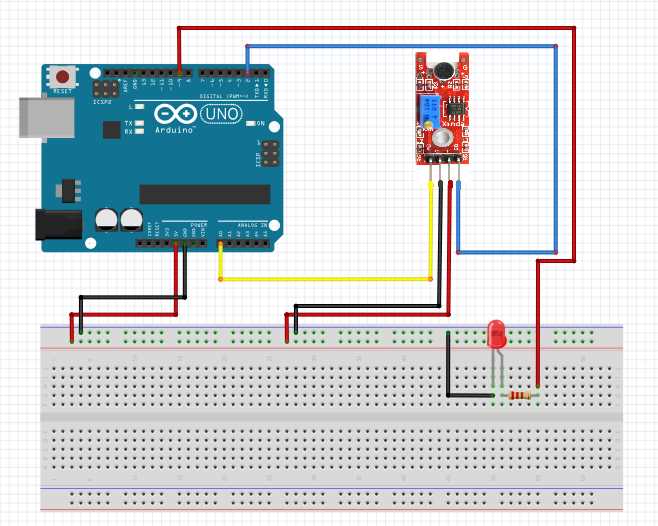
Типичная схема подключения: VCC микрофона к 5V Arduino, GND к GND, а выходной сигнал – к аналоговому пину (например, A0). Если используете модуль с цифровым выходом, подключите его к любому цифровому пину с поддержкой прерываний (например, D2 или D3). Для стабильной работы добавьте конденсатор 0,1 мкФ между VCC и GND микрофона – это снизит высокочастотные помехи.
При работе с аналоговым сигналом избегайте длинных проводов (более 10 см) без экранирования – они улавливают наводки от сети 50 Гц. Для фильтрации используйте программное сглаживание (скользящее среднее) или аппаратный фильтр нижних частот на операционном усилителе. Если требуется точное измерение амплитуды, калибруйте датчик по эталонному источнику звука (например, генератору 1 кГц на уровне 94 дБ).
Подключение микрофона к Arduino: пошаговая инструкция
Для работы с аналоговым микрофоном, например, модулем KY-037 или MAX4466, потребуется плата Arduino Uno/Nano и три провода: питание (VCC), земля (GND) и сигнальный (OUT). Подключите VCC к 5V или 3.3V Arduino в зависимости от требований модуля, GND к общей земле, а OUT – к аналоговому пину A0. Если микрофон цифровой (например, I2S-интерфейс), используйте пины SCK, WS и SD для тактового сигнала, выбора слова и данных соответственно.
Перед подключением проверьте рабочее напряжение микрофона. Модули на базе MAX4466 работают от 2.4V до 5.5V, а KY-037 – от 3.3V до 5V. Превышение напряжения выведет модуль из строя. Для стабилизации питания добавьте конденсатор 100 мкФ между VCC и GND рядом с микрофоном, чтобы снизить шумы.
После физического подключения загрузите тестовый скетч для проверки сигнала. Для аналогового микрофона используйте код:
void setup() {
Serial.begin(9600);
}
void loop() {
int micValue = analogRead(A0);
Serial.println(micValue);
delay(10);
}
Откройте монитор порта (Ctrl+Shift+M) и наблюдайте за значениями. При отсутствии звука показания должны колебаться в пределах 500–520 (для 5V Arduino). Резкие скачки до 1023 или падения до 0 указывают на неисправность модуля или неправильное подключение.
Для цифровых микрофонов с I2S (например, INMP441) установите библиотеку I2S.h через менеджер библиотек Arduino. Подключите пины согласно таблице:
| Микрофон | Arduino |
|---|---|
| SCK | GPIO14 (D5) |
| WS | GPIO12 (D6) |
| SD | GPIO13 (D7) |
| L/R | GND (левый канал) |
Используйте пример I2S_Microphone.ino из библиотеки для проверки захвата аудиоданных. При проблемах с синхронизацией проверьте тактовую частоту: для 16-битного звука на 44.1 кГц требуется 1.4112 МГц (44100 * 32).
Для фильтрации шумов в аналоговом сигнале добавьте программный фильтр нижних частот. Пример кода для сглаживания:
const int numReadings = 10;
int readings[numReadings];
int readIndex = 0;
int total = 0;
void setup() {
Serial.begin(9600);
for (int i = 0; i < numReadings; i++) {
readings[i] = 0;
}
}
void loop() {
total = total - readings[readIndex];
readings[readIndex] = analogRead(A0);
total = total + readings[readIndex];
readIndex = (readIndex + 1) % numReadings;
int average = total / numReadings;
Serial.println(average);
delay(5);
}
Увеличьте numReadings для более плавного сигнала, но это замедлит реакцию на изменения. Оптимальное значение – 5–20 в зависимости от задачи.
Если микрофон используется для распознавания звуковых событий (например, хлопков), настройте порог срабатывания. Запишите фоновый уровень шума в тишине (например, 512) и установите порог на 10–20% выше. Пример условия:
if (micValue > 600) {
// Реакция на звук
}
Для точной настройки используйте гистограмму значений из монитора порта. Избегайте жесткого кодирования порога – применяйте динамическую калибровку при старте программы.
При работе с ESP32 или другими платами с ограниченным количеством аналоговых пинов используйте внешний АЦП, например, MCP3008. Подключите его по SPI (пины CLK, MISO, MOSI, CS) и читайте данные через библиотеку Adafruit_MCP3008.h. Это позволит подключить до 8 микрофонов одновременно. Для ESP32 также рассмотрите использование встроенного АЦП с разрешением 12 бит вместо 10 бит у Arduino Uno.
Выбор подходящего микрофона для работы с Arduino

Для проектов с Arduino подходят микрофоны с аналоговым или цифровым выходом, но ключевое значение имеет чувствительность и частотный диапазон. Аналоговые модели, такие как электретные микрофоны (например, MAX4466 или INMP441), требуют внешнего усилителя, но обеспечивают гибкость в настройке. Цифровые микрофоны (например, I2S-интерфейсные INMP441 или PDM-микрофоны) подключаются напрямую к контроллеру, но требуют поддержки соответствующих протоколов в коде.
При выборе микрофона учитывайте уровень шума и динамический диапазон. Для записи речи достаточно микрофона с чувствительностью -42 дБ (например, CMA-4544PF-W), а для анализа звуковых сигналов (например, детекции хлопков) лучше использовать модели с низким уровнем шума, такие как SPH0645LM4H-B. Избегайте микрофонов с высоким уровнем собственных шумов, так как Arduino не имеет встроенного шумоподавления.
Форм-фактор микрофона зависит от задачи. Для компактных устройств подойдут миниатюрные электретные капсюли (например, WM-61A), но они требуют дополнительной схемы смещения. Если важна направленность, выбирайте микрофоны с кардиоидной диаграммой (например, POM-3044P-R), которые подавляют шумы с боковых направлений. Для всенаправленного захвата звука используйте модели с круговой диаграммой (например, EM158).
Питание микрофона критично для стабильной работы. Электретные микрофоны требуют напряжения смещения (обычно 2–10 В), которое можно обеспечить через резистор или специализированный усилитель (например, MAX9814 с автоматическим регулированием усиления). Цифровые микрофоны питаются от 3,3 В или 5 В, но некоторые модели (например, INMP441) требуют отдельного источника питания для аналоговой части.
Совместимость с Arduino определяется не только физическим подключением, но и библиотеками. Для I2S-микрофонов (например, INMP441) используйте библиотеку *I2S* или *ESP32-I2S*, а для PDM-микрофонов – *PDM*. Аналоговые микрофоны подключаются к АЦП Arduino (пины A0–A5), но учтите, что разрешение АЦП ограничено 10 битами, что снижает точность измерений. Для повышения точности используйте внешний АЦП (например, ADS1115).
Цена микрофона не всегда коррелирует с качеством. Дешевые электретные капсюли (например, за 50 рублей) могут работать не хуже дорогих аналогов, если правильно настроить схему усиления. Однако для задач, требующих высокой точности (например, спектральный анализ), лучше выбрать специализированные модули (например, Adafruit I2S MEMS Microphone) с предварительно настроенными параметрами.
Перед покупкой проверьте документацию на микрофон: наличие схем подключения, примеров кода и отзывов о работе с Arduino. Некоторые модели (например, MAX4466) имеют встроенные усилители с регулируемым коэффициентом усиления, что упрощает настройку. Избегайте микрофонов без четких технических характеристик – они могут не соответствовать заявленным параметрам.
Необходимые компоненты и инструменты для подключения
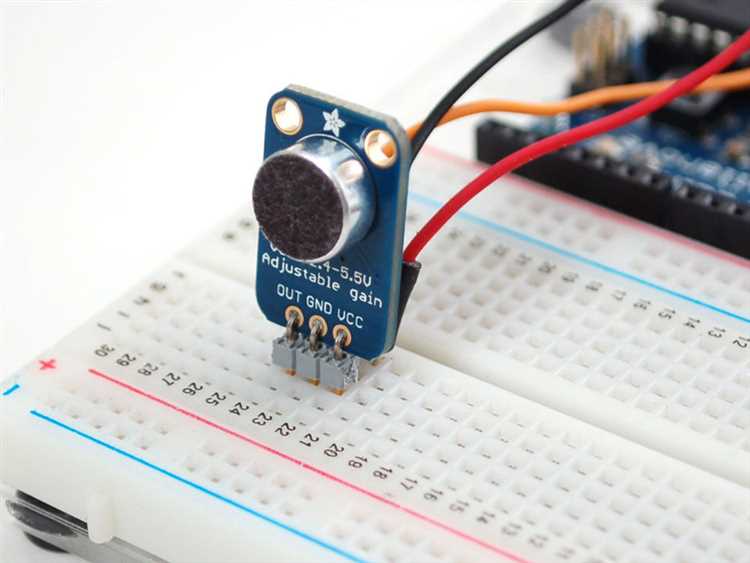
Для подключения микрофона к Arduino потребуется модуль аналогового или цифрового микрофона. Оптимальный выбор – модуль MAX4466 с усилителем, который обеспечивает чувствительность до -44 дБ и диапазон частот 20–20 000 Гц. Альтернатива – электретный микрофон с операционным усилителем LM386, если требуется бюджетное решение. Для цифрового ввода подойдет модуль INMP441 с I2S-интерфейсом, поддерживающий 24-битное разрешение и частоту дискретизации до 48 кГц. Убедитесь, что модуль совместим с напряжением питания Arduino (3,3 В или 5 В).
Помимо микрофона, понадобятся соединительные провода с разъемами Dupont (мама-папа или папа-папа) для подключения к плате. Для стабильной работы рекомендуется использовать провода сечением не менее 0,14 мм². Если модуль микрофона требует внешнего питания, подготовьте макетную плату с шинами питания или отдельный источник на 3,3–5 В. Для отладки сигнала пригодится осциллограф или логический анализатор, особенно при работе с аналоговыми модулями, где важно контролировать уровень шумов и амплитуду сигнала.
Схема подключения микрофона к аналоговому входу Arduino

Для подключения электретного микрофона к Arduino используйте модуль с предусилителем, например MAX4466 или LM386. Эти модули усиливают слабый сигнал микрофона до уровня, распознаваемого аналоговым входом (0–5 В). Подключите выход модуля (OUT) к аналоговому пину Arduino (A0–A5), а питание (VCC) – к 5 В или 3.3 В в зависимости от спецификаций модуля. Землю (GND) соедините с GND платы.
Типовая схема включает:
- Микрофонный модуль: VCC → 5V Arduino, GND → GND, OUT → A0.
- Дополнительный конденсатор (10 мкФ) между VCC и GND модуля для стабилизации питания.
- Резистор (10 кОм) между OUT и GND для смещения сигнала в положительный диапазон, если модуль не имеет встроенной схемы смещения.
При использовании модуля без предусилителя потребуется операционный усилитель (например, TL072) для усиления сигнала до приемлемого уровня.
Избегайте длинных проводов между микрофоном и Arduino – они улавливают помехи. Для снижения шумов экранируйте кабель или используйте витую пару. Проверьте напряжение на выходе модуля мультиметром: при отсутствии звука оно должно быть около 2.5 В (половина питания), при громком звуке – колебаться в пределах 0–5 В. Если сигнал выходит за эти границы, отрегулируйте коэффициент усиления модуля подстроечным резистором или измените схему смещения.
Настройка аналогового входа и калибровка сигнала
Подключите микрофон к аналоговому входу Arduino (например, A0) через делитель напряжения, если модуль не имеет встроенного усилителя. Для стандартных электретных микрофонов с выходным сигналом 0–5 В используйте резистор 10 кОм между выходом микрофона и питанием 5 В, а сигнальный провод подведите к A0. Убедитесь, что общий провод микрофона соединён с GND платы.
Загрузите на Arduino скетч для чтения аналогового сигнала с частотой дискретизации не менее 8 кГц. Пример кода: analogRead(A0) в цикле с задержкой delayMicroseconds(125) для обеспечения стабильной выборки. Избегайте использования delay(), так как это снижает точность измерений.
Перед калибровкой измерьте уровень шума в помещении. Запустите монитор порта и запишите среднее значение сигнала при отсутствии звука (обычно 500–520 для Arduino Uno). Это значение станет базовым уровнем для дальнейших расчётов. Если показания сильно отклоняются (например, ниже 400 или выше 600), проверьте подключение и питание микрофона.
Для калибровки динамического диапазона подайте на микрофон эталонный звук с известной амплитудой (например, 94 дБ SPL от калибратора или генератора тона 1 кГц). Запишите максимальное значение сигнала на A0 (обычно 800–1023 при громком звуке). Разница между базовым уровнем и максимальным значением определит рабочий диапазон. Если размах сигнала менее 200 единиц, увеличьте чувствительность микрофона, уменьшив резистор в делителе до 4,7 кОм.
Реализуйте программную фильтрацию сигнала для устранения высокочастотных помех. Используйте скользящее среднее по 5–10 выборкам: int filteredValue = (filteredValue * 4 + analogRead(A0)) / 5;. Это сгладит резкие скачки, сохранив полезный сигнал. Для более сложной обработки примените БИХ-фильтр с частотой среза 3 кГц, если требуется анализ речи.
Настройте порог срабатывания для детектирования звука. Вычислите его как базовый уровень плюс 10–15% от динамического диапазона (например, threshold = baseline + 0.15 * (maxValue - baseline)). Проверьте работу порога, хлопнув в ладоши на расстоянии 30 см от микрофона – сигнал должен уверенно превышать порог. При ложных срабатываниях увеличьте коэффициент до 0,2.
Сохраните калибровочные значения в EEPROM Arduino, чтобы избежать повторной настройки при перезагрузке. Используйте библиотеку EEPROM.h для записи базового уровня и порога: EEPROM.put(0, baseline); EEPROM.put(2, threshold);. При старте скетча считывайте эти значения для автоматической инициализации параметров.
Написание базового кода для считывания данных с микрофона
Для обработки звука в реальном времени добавьте пороговое значение, чтобы игнорировать фоновый шум. Например, если среднее значение превышает 500, считайте это сигналом. Для динамической подстройки порога используйте функцию map(), чтобы масштабировать входные данные в нужный диапазон. Пример: int threshold = map(analogRead(A1), 0, 1023, 200, 800);, где A1 – потенциометр для ручной настройки. Избегайте задержек в цикле loop(), чтобы не пропускать быстрые изменения сигнала.
Обработка и фильтрация шумов в сигнале микрофона

Микрофон на Arduino генерирует аналоговый сигнал с уровнем шумов от 50 до 200 мВ даже в тихой среде. Основные источники помех: электромагнитные наводки от питания, дребезг контактов и собственные шумы операционного усилителя модуля (например, MAX4466). Для подавления высокочастотных помех используйте RC-фильтр нижних частот на входе АЦП с частотой среза 3–5 кГц. Формула расчёта: f_c = 1/(2πRC), где R = 10 кОм, C = 3,3 нФ.
Программная фильтрация начинается с усреднения отсчётов. При частоте дискретизации 8 кГц собирайте 8–16 выборок в буфер и вычисляйте среднее арифметическое. Это снижает случайные выбросы на 6–12 дБ. Для динамических сигналов применяйте экспоненциальное сглаживание: filtered = α * new_sample + (1-α) * previous_filtered, где α = 0,1–0,3. Значение α подбирайте экспериментально – меньшее α сильнее сглаживает, но увеличивает задержку.
- Подавление сетевых наводок (50/60 Гц): используйте режекторный фильтр второго порядка на базе биквадратного звена. Коэффициенты для 50 Гц: b0 = 0,9989, b1 = -1,9978, b2 = 0,9989, a1 = -1,9978, a2 = 0,9978. Реализуйте фильтр в коде через разностное уравнение.
- Устранение постоянной составляющей: вычитайте скользящее среднее за 100–200 мс. Это компенсирует дрейф нуля АЦП и смещение сигнала от температурных колебаний.
- Шумоподавление в паузах: детектируйте тишину по порогу (например, 5% от максимальной амплитуды) и обнуляйте сигнал ниже этого уровня. Порог корректируйте адаптивно, анализируя гистограмму амплитуд за последние 500 мс.
Для голосовых приложений примените банк фильтров на основе БПФ. Разбейте спектр 0–4 кГц на 8 полос с центральными частотами 250, 500, 1000, 1500, 2000, 2500, 3000 и 3500 Гц. Коэффициенты усиления для каждой полосы подберите так, чтобы выровнять амплитудно-частотную характеристику микрофона. Используйте оконную функцию Ханна для снижения эффекта Гиббса при обратном БПФ.
Аппаратные улучшения снижают нагрузку на процессор. Добавьте ферритовые бусины на линии питания и сигнала микрофона. Для модулей с аналоговым выходом используйте дифференциальное подключение к АЦП через инструментальный усилитель (например, INA125) с коэффициентом усиления 10–100. Это подавляет синфазные помехи до 80 дБ. Заземляйте экран кабеля микрофона только с одной стороны, чтобы избежать контуров заземления.
Тестируйте фильтры на реальных данных. Запишите 10-секундный образец шума в тихой комнате и проанализируйте его спектр через Audacity или Python-библиотеку librosa. Сравните SNR до и после фильтрации – целевое значение для голосовых приложений ≥20 дБ. Для калибровки используйте генератор белого шума на частоте дискретизации 8 кГц и уровне -30 дБFS.