Как регулировать обороты трехфазного двигателя

Трехфазные асинхронные электродвигатели – основа промышленных приводов, где регулирование частоты вращения критически важно для оптимизации технологических процессов. Стандартный двигатель с номинальной частотой 50 Гц и синхронной скоростью 3000 об/мин при прямом подключении к сети работает на фиксированных оборотах, что ограничивает его применение. Для изменения скорости используют методы, различающиеся по эффективности, стоимости и сложности реализации: от простых механических решений до современных систем с обратной связью.
Наиболее распространенный способ – частотное регулирование с помощью преобразователей частоты (ПЧ). ПЧ изменяют амплитуду и частоту питающего напряжения, позволяя плавно регулировать обороты в диапазоне от 0 до 200% от номинала. Например, для двигателя 11 кВт с номинальной частотой 50 Гц ПЧ типа Siemens SINAMICS G120 обеспечивает точность поддержания скорости ±0,1% при нагрузке до 150% от номинального момента. При этом КПД системы достигает 95–97%, а энергопотребление снижается на 20–30% за счет исключения пусковых токов и работы на оптимальных режимах.
Альтернативный метод – регулирование напряжением с использованием автотрансформаторов или тиристорных регуляторов. Снижение напряжения на 20% уменьшает момент двигателя на 36%, что приводит к падению оборотов на 5–15% в зависимости от нагрузки. Однако этот способ применим только для вентиляторных нагрузок (квадратичная зависимость момента от скорости), так как при постоянном моменте двигатель перегревается из-за роста скольжения. Для двигателей мощностью до 5 кВт тиристорные регуляторы типа РНТО-250 позволяют снизить обороты до 70% от номинала, но с потерей КПД до 10–15%.
Для ступенчатого изменения скорости используют переключение числа пар полюсов. Двигатели с двумя обмотками (например, 4/2 полюса) обеспечивают две фиксированные скорости: 1500 и 3000 об/мин. Модификации с одной обмоткой и переключением схемы (звезда-треугольник) позволяют получить три скорости, но требуют дополнительных контакторов и усложняют схему управления. Такие решения оправданы в приводах насосов и конвейеров, где не требуется плавное регулирование, а стоимость системы ниже на 30–40% по сравнению с ПЧ.
В системах с высокими требованиями к динамике применяют векторное управление, реализуемое в современных ПЧ. Оно основано на раздельном регулировании магнитного потока и момента двигателя с использованием математической модели. Для двигателя 7,5 кВт с энкодером 1024 имп/об векторный ПЧ типа ABB ACS880 обеспечивает точность поддержания скорости ±0,01% и время реакции на изменение нагрузки менее 5 мс. Это критично для станков с ЧПУ, где отклонение скорости на 0,5% приводит к браку обработки. Стоимость таких систем в 2–3 раза выше скалярных ПЧ, но окупается за счет повышения производительности оборудования.
При выборе способа регулирования учитывайте: тип нагрузки (постоянный момент, вентиляторная, квадратичная), диапазон регулирования (минимальная и максимальная скорость), требования к точности и энергоэффективность. Для насосов и вентиляторов оптимальны скалярные ПЧ с U/f-регулированием, для станков – векторные системы с обратной связью. В простых случаях (например, приводы конвейеров) достаточно переключения полюсов или тиристорного регулятора. Всегда проверяйте совместимость выбранного метода с характеристиками двигателя: максимальный ток, класс изоляции, допустимое скольжение.
Как подобрать частотный преобразователь под мощность двигателя
Мощность частотного преобразователя (ЧП) должна превышать номинальную мощность двигателя на 10–25% для компенсации пусковых токов и динамических нагрузок. Например, для двигателя 7,5 кВт выбирайте преобразователь на 9–10 кВт. При работе с частыми пусками или высокой инерционной нагрузкой запас увеличивайте до 30–50%. Учитывайте также класс защиты (IP) и диапазон рабочих температур: для промышленных условий подходят модели с IP54 и выше, а для эксплуатации при температуре выше +40°C требуется преобразователь с усиленным охлаждением.
Проверяйте соответствие выходного тока ЧП номинальному току двигателя. Если ток двигателя 15 А, преобразователь должен обеспечивать не менее 16–18 А. Для многоскоростных двигателей или систем с рекуперацией энергии выбирайте модели с расширенными функциями, например, поддержкой векторного управления или встроенным тормозным резистором. При использовании в сетях с нестабильным напряжением (колебания ±10%) отдавайте предпочтение преобразователям с широким диапазоном входного напряжения (380–480 В).
Настройка параметров ШИМ для плавного изменения скорости
Широтно-импульсная модуляция (ШИМ) – ключевой метод управления оборотами трехфазного электродвигателя за счет изменения среднего напряжения на обмотках. Для плавного регулирования скорости необходимо корректно настроить три основных параметра: частоту несущей волны, коэффициент заполнения и разрешение ШИМ. Оптимальные значения зависят от типа двигателя, нагрузки и требований к динамике.
Частота несущей волны определяет интервал переключения силовых ключей (IGBT или MOSFET). Для большинства промышленных асинхронных двигателей рекомендуется диапазон 2–20 кГц. При частоте ниже 2 кГц возникают слышимые шумы и пульсации момента, выше 20 кГц растут потери на переключение. Для высокоскоростных двигателей (например, шпинделей) частоту увеличивают до 50 кГц, но требуется применение быстродействующих транзисторов с временем переключения менее 100 нс.
Коэффициент заполнения (duty cycle) напрямую влияет на среднее напряжение, подаваемое на двигатель. При изменении от 0 до 100% скорость регулируется от нуля до номинальной. Для плавного старта и остановки используют линейное или S-образное изменение коэффициента заполнения. Например, при пуске двигателя 4 кВт с номинальным напряжением 380 В коэффициент заполнения увеличивают на 5% за 100 мс, избегая бросков тока свыше 150% от номинального.
Разрешение ШИМ определяет дискретность изменения скорости. Современные микроконтроллеры (STM32, dsPIC) поддерживают 10–16-битное разрешение. Для точного позиционирования (например, в сервоприводах) используют 12–16 бит, что обеспечивает шаг регулировки менее 0,01% от максимальной скорости. При 10-битном разрешении и частоте несущей 10 кГц минимальный шаг изменения скорости составит 0,1% (1024 уровня).
Для минимизации гармонических искажений и нагрева двигателя применяют методы модуляции:
- Синусоидальная ШИМ (SPWM) – формирует выходное напряжение, близкое к синусоиде, снижая потери на 15–20% по сравнению с прямоугольной модуляцией. Требует генерации трехфазных опорных сигналов с частотой до 1 кГц.
- Пространственно-векторная модуляция (SVPWM) – увеличивает диапазон линейного регулирования на 15% за счет оптимального выбора векторов напряжения. Эффективна для двигателей с номинальной частотой выше 50 Гц.
- Гистерезисная модуляция – проста в реализации, но генерирует широкий спектр гармоник, что требует установки LC-фильтров.
Практическая настройка начинается с калибровки датчиков обратной связи (энкодеров или датчиков Холла). Погрешность измерения скорости не должна превышать 0,5% для стабильной работы системы. При использовании ПИД-регулятора коэффициенты настраивают экспериментально: пропорциональный (Kp) – 0,1–0,5, интегральный (Ki) – 0,01–0,1, дифференциальный (Kd) – 0,001–0,01. Для двигателя 7,5 кВт с инерционной нагрузкой оптимальные значения: Kp=0,3, Ki=0,05, Kd=0,005.
Тестирование проводят под нагрузкой, контролируя ток, температуру обмоток и вибрации. При появлении резонансных явлений (обычно на частотах 50–200 Гц) корректируют частоту несущей или вводят зоны запрещенных частот. Для двигателей с постоянными магнитами (PMSM) дополнительно настраивают угол опережения тока (обычно 5–15°) для компенсации реактивной мощности. Завершающий этап – проверка работы в режиме рекуперативного торможения с ограничением тока на уровне 120% от номинального.
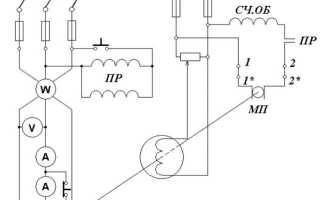
Использование автотрансформатора для регулировки напряжения
Принцип работы основан на изменении коэффициента трансформации за счет перемещения подвижного контакта (щетки) по виткам обмотки. При снижении напряжения на 10% момент двигателя падает на 19%, что приводит к пропорциональному уменьшению оборотов. Однако этот метод эффективен только для асинхронных двигателей с короткозамкнутым ротором, так как у машин с фазным ротором требуется дополнительная регулировка сопротивления в цепи ротора. Для стабильной работы рекомендуется использовать автотрансформаторы с медными обмотками и сечением провода не менее 2,5 мм² на 1 кВт мощности.
Ключевое преимущество автотрансформатора – высокий КПД (до 98%) и минимальные потери энергии, так как часть мощности передается напрямую без трансформации. Однако при длительной работе на пониженном напряжении возрастает ток статора, что приводит к перегреву обмоток. Для предотвращения этого необходимо ограничивать время работы на напряжении ниже 85% от номинального или использовать системы принудительного охлаждения. Также стоит учитывать, что автотрансформаторы не обеспечивают гальванической развязки, что повышает риск поражения электрическим током при обслуживании.
Монтаж автотрансформатора требует соблюдения фазировки: при неправильном подключении фаз напряжение на обмотках двигателя может превысить допустимые значения, что приведет к выходу из строя изоляции. Для защиты от перегрузок рекомендуется устанавливать тепловые реле с уставкой на 10–15% выше номинального тока двигателя. Пример расчета: для двигателя мощностью 7,5 кВт с номинальным током 15 А и пусковым током 90 А автотрансформатор должен выдерживать кратковременную нагрузку до 100 А. В схемах с частыми пусками целесообразно применять автотрансформаторы с отводами на 50%, 65% и 80% от номинального напряжения.
Несмотря на простоту и надежность, автотрансформаторы уступают частотным преобразователям в точности регулировки и энергоэффективности при работе с переменной нагрузкой. Однако для задач, где требуется плавное изменение оборотов в узком диапазоне (например, вентиляторы, насосы с постоянным моментом нагрузки), они остаются экономически выгодным решением. При эксплуатации необходимо регулярно проверять состояние щеточного узла и контактных поверхностей, так как их износ приводит к искрению и падению напряжения на выходе.
Схемы подключения реостата в цепь ротора асинхронного двигателя
Подключение реостата в цепь ротора асинхронного двигателя с фазным ротором позволяет регулировать пусковые токи и момент, а также плавно изменять частоту вращения. Основные схемы реализуются через соединение реостата с обмотками ротора по принципу звезды или треугольника. Выбор схемы зависит от требуемого диапазона регулирования, мощности двигателя и условий эксплуатации. Для двигателей мощностью до 100 кВт чаще применяют схему с последовательным включением реостата в каждую фазу ротора, что обеспечивает симметричное распределение токов.
В схеме с несимметричным подключением реостата сопротивление вводится только в одну или две фазы ротора. Это упрощает конструкцию, но приводит к неравномерному распределению токов и повышенным потерям в обмотках. Такое решение оправдано для двигателей малой мощности (до 10 кВт) при кратковременном регулировании. При этом пусковой момент снижается на 15–20% по сравнению с симметричной схемой, а нагрев обмоток может увеличиваться на 10–12%.
Для плавного пуска и регулирования частоты вращения в широком диапазоне применяют схему с жидкостным реостатом. В этом случае сопротивление изменяется за счет погружения электродов в электролит (обычно раствор соды или соли). Преимущества: высокая теплоемкость, возможность точной настройки сопротивления. Недостатки: необходимость обслуживания, ограниченный срок службы электролита (6–12 месяцев), зависимость параметров от температуры. Такие реостаты используют для двигателей мощностью от 50 кВт и выше, особенно в приводах насосов и вентиляторов.
При ступенчатом регулировании применяют металлические реостаты с переключаемыми секциями. Сопротивление каждой секции рассчитывается по формуле:
R = (Uф / Iпуск) - Rобм,
где Uф – фазное напряжение ротора, Iпуск – допустимый пусковой ток, Rобм – активное сопротивление обмотки ротора. Для двигателей с номинальным током ротора до 200 А рекомендуется использовать реостаты с 3–5 ступенями, для токов свыше 500 А – 6–8 ступеней. Переключение ступеней должно выполняться без разрыва цепи, чтобы избежать перенапряжений.
В схемах с автоматическим регулированием применяют реостаты с электроприводом или тиристорные регуляторы сопротивления. Такие системы позволяют поддерживать заданный ток ротора независимо от нагрузки. Например, для двигателя мощностью 75 кВт с током ротора 150 А используют реостат с сопротивлением 0,2–0,5 Ом на фазу, управляемый контроллером по сигналу обратной связи от датчика тока. Точность поддержания тока составляет ±5%, что достаточно для большинства промышленных применений.
При выборе схемы подключения необходимо учитывать тепловые потери в реостате. Для металлических реостатов плотность тока не должна превышать 1,5–2 А/мм² для проволочных элементов и 3–4 А/мм² для ленточных. Для жидкостных реостатов допустимая плотность тока составляет 0,5–1 А/см² поверхности электродов. Превышение этих значений приводит к перегреву и выходу реостата из строя. В таблице приведены рекомендуемые параметры реостатов для двигателей разной мощности:
| Мощность двигателя, кВт |
Ток ротора, А |
Сопротивление реостата, Ом |
Тип реостата |
| 5–10 |
15–30 |
0,8–1,5 |
Металлический, 3 ступени |
| 20–50 |
50–120 |
0,3–0,8 |
Металлический, 5 ступеней |
| 75–150 |
150–300 |
0,15–0,4 |
Жидкостный или металлический с автоматикой |
| 200–500 |
400–1000 |
0,05–0,2 |
Жидкостный с принудительным охлаждением |
Особое внимание следует уделять защите реостата от коротких замыканий и перегрузок. В цепь ротора рекомендуется устанавливать быстродействующие предохранители или автоматические выключатели с током срабатывания на 20–30% выше максимального тока ротора. Для жидкостных реостатов обязательна установка датчиков уровня электролита и температуры, а также системы аварийного отключения при превышении допустимых значений. При эксплуатации металлических реостатов необходимо регулярно проверять состояние контактов и сопротивление изоляции, которое должно быть не менее 0,5 МОм.
Программирование контроллера для ступенчатого изменения оборотов
Логика переключения ступеней строится на обработке внешних сигналов или команд по интерфейсу UART/Modbus. Для ручного управления используются кнопки или энкодер, прерывания от которых вызывают инкремент/декремент индекса массива speedLevels. В случае автоматизированных систем команды поступают через протокол Modbus RTU, где регистр 0x0001 хранит текущий уровень скорости (0–3). Пример обработки команды: if (modbusRxBuffer[1] == 0x06) currentSpeedIndex = modbusRxBuffer[4];.
Для плавного перехода между ступенями применяется программный фильтр или линейная интерполяция. Например, при смене уровня с 50% на 75% контроллер в течение 200 мс постепенно увеличивает ШИМ-сигнал с шагом 1% за 10 мс. Это снижает механические нагрузки на двигатель и предотвращает броски тока. Реализация на C для STM32: for (uint16_t i = speedLevels[currentIndex]; i <= speedLevels[newIndex]; i += 100) { TIM1->CCR1 = i; HAL_Delay(10); }.
Защита от некорректных значений критична при ступенчатом управлении. Контроллер должен проверять границы массива speedLevels и отбрасывать команды, выходящие за пределы 0–3. Дополнительно вводится таймаут на переключение: если команда не подтверждена в течение 500 мс, система возвращается к предыдущему уровню. Пример проверки: if (newIndex >= sizeof(speedLevels)/sizeof(speedLevels[0])) return;.
Диагностика работы системы включает мониторинг текущего уровня скорости и состояния входов. В прошивке предусматривается регистр ошибок, где бит 0x01 сигнализирует о превышении допустимого тока, а бит 0x02 – о потере связи с управляющим устройством. Данные передаются по Modbus в регистре 0x0002 каждые 100 мс. Пример записи ошибки: errorRegister |= 0x01;.
Оптимизация энергопотребления достигается за счет отключения неиспользуемых периферийных модулей контроллера. Например, при работе на 25% скорости отключается АЦП для измерения тока, если он не требуется для текущего режима. Управление питанием реализуется через регистры RCC->APB1ENR и RCC->APB2ENR. Пример отключения АЦП: RCC->APB2ENR &= ~RCC_APB2ENR_ADC1EN;.
Тестирование прошивки проводится на стенде с имитацией нагрузки. Для проверки ступенчатого переключения используется генератор сигналов, подающий команды с интервалом 1 с. Логический анализатор фиксирует ШИМ-сигнал и дискретные выходы, а осциллограф контролирует форму тока двигателя. Критерий успешности – отсутствие скачков тока более 10% от номинала при переходе между ступенями и стабильность частоты ШИМ в пределах ±0.5%.
Сравнение методов прямого и косвенного управления током

Прямое управление током подразумевает регулирование амплитуды и фазы тока статора электродвигателя с помощью датчиков тока, установленных в каждой фазе. Этот метод обеспечивает точность поддержания заданного тока в пределах ±1–2% от номинального значения, что критично для приложений с высокими требованиями к динамике, например, в сервоприводах станков с ЧПУ. Однако реализация требует использования быстродействующих АЦП (не менее 12 бит, частота дискретизации от 20 кГц) и микроконтроллеров с тактовой частотой от 100 МГц, что увеличивает стоимость системы на 30–40% по сравнению с косвенными методами.
Косвенное управление током основано на расчете тока статора через измерение других параметров: напряжения на обмотках, частоты вращения ротора или магнитного потока. Наиболее распространенные подходы:
- Метод U/f – регулирование напряжения пропорционально частоте. Применим для асинхронных двигателей с номинальной мощностью до 15 кВт, где погрешность тока достигает 5–8%. Эффективен при постоянной нагрузке, но не обеспечивает стабильность момента при резких изменениях нагрузки.
- Векторное управление без датчиков тока – оценка тока через модель двигателя. Точность зависит от качества идентификации параметров: при температурном дрейфе сопротивления обмоток (до 0,4%/°C) ошибка может превышать 10%. Требует калибровки при каждом запуске.
- Метод IR-компенсации – коррекция напряжения с учетом падения на активном сопротивлении обмоток. Работает в диапазоне частот 5–50 Гц, но теряет эффективность при частотах выше 60 Гц из-за влияния индуктивности.
Ключевое отличие методов – реакция на возмущения. Прямое управление компенсирует скачки нагрузки за 1–3 мс благодаря обратной связи по току, тогда как косвенные методы реагируют с задержкой 10–50 мс, что приводит к провалам момента до 15–20%. Для задач, где допустимы кратковременные отклонения (например, насосы, вентиляторы), косвенные методы предпочтительнее из-за снижения стоимости оборудования на 25–35%. В системах с частыми переходными процессами (подъемные механизмы, конвейеры) прямое управление незаменимо.
Энергоэффективность также различается. Прямое управление снижает потери в меди на 3–5% за счет точного поддержания тока, но увеличивает потери в силовой электронике из-за высокой частоты коммутации (до 20 кГц). Косвенные методы, особенно U/f, работают на частотах 2–10 кГц, что снижает потери на переключение, но повышает потери в стали двигателя на 2–4% из-за неоптимального намагничивания. Для двигателей мощностью свыше 30 кВт разница в КПД может достигать 1–1,5%.
Выбор метода определяется тремя факторами: требованиями к точности, бюджетом и условиями эксплуатации. Для серийных применений с умеренными нагрузками (компрессоры, транспортеры) оптимально косвенное управление с векторной оценкой тока – снижение затрат на 30% при приемлемой точности ±5%. В прецизионных системах (робототехника, шлифовальные станки) прямое управление окупается за счет повышения производительности на 10–15% и снижения износа механики. При проектировании рекомендуется проводить моделирование в средах типа MATLAB/Simulink или PSIM с учетом реальных параметров двигателя и нагрузки.