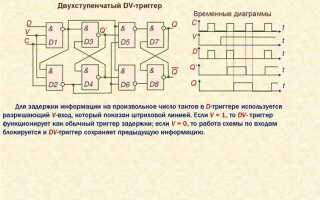
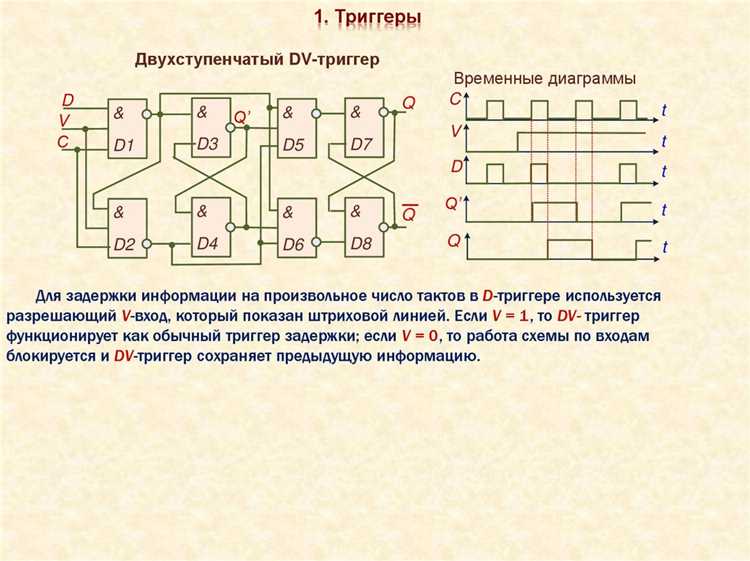
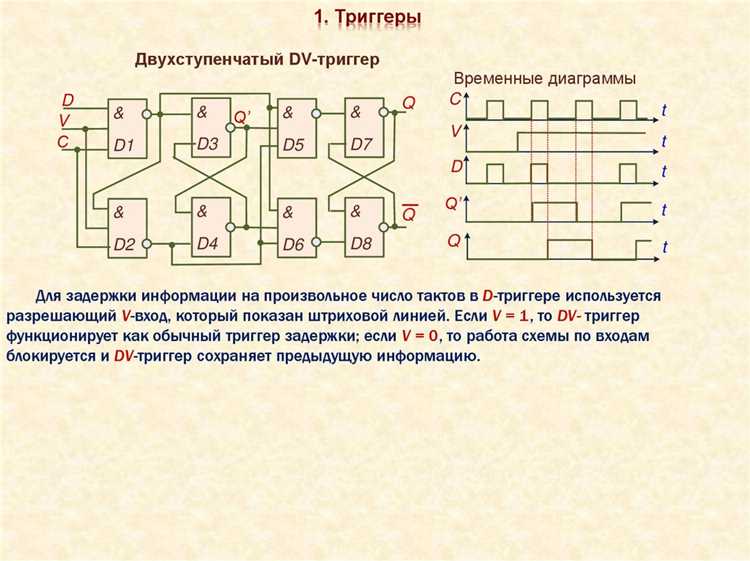
Двухступенчатые триггеры решают проблему метастабильности в синхронных схемах, где данные и тактовый сигнал не синхронизированы. В одноступенчатых триггерах (например, D-триггерах) при нарушении времени установки (setup time) или удержания (hold time) выход может оставаться в неопределённом состоянии до нескольких наносекунд. Это критично для высокоскоростных интерфейсов, таких как DDR4 (3200 МТ/с), где допустимое время метастабильности не превышает 100 пс. Двухступенчатая структура (master-slave) разделяет процесс захвата данных на две фазы: первая ступень фиксирует входной сигнал по фронту тактового импульса, вторая – передаёт его на выход по спаду. Это снижает вероятность метастабильности до значений ниже 10-12 ошибок на бит при частоте 1 ГГц.
В схемах с динамическим управлением (например, конвейерных процессорах) двухступенчатые триггеры минимизируют гонки сигналов. В одноступенчатых решениях задержка распространения (clock-to-Q delay) может приводить к коллизиям, когда следующий триггер фиксирует нестабильные данные. В двухступенчатых триггерах задержка между ступенями обеспечивает запас времени для стабилизации сигнала. Для FPGA Xilinx UltraScale+ этот запас составляет 0,3–0,5 нс, что позволяет безопасно работать на частотах до 800 МГц без дополнительных синхронизаторов. В ASIC-проектах на 7-нм техпроцессе двухступенчатые триггеры снижают потребление энергии на 15–20% за счёт уменьшения количества переключений в метастабильном состоянии.
При проектировании схем с асинхронными входами (например, UART или SPI) двухступенчатые триггеры используются в качестве синхронизаторов. Стандартный подход – каскад из двух триггеров, где первый захватывает асинхронный сигнал, а второй синхронизирует его с тактовой сеткой. Вероятность ошибки синхронизации при этом определяется формулой: P = fclk × tmeta × e−tsetup/τ, где τ – постоянная времени триггера. Для триггеров с τ = 50 пс и tsetup = 100 пс вероятность ошибки на частоте 100 МГц составляет менее 10−15. В критичных системах (медицинское оборудование, авиационная электроника) рекомендуется использовать трёхступенчатые синхронизаторы для дополнительного запаса надёжности.
В схемах с обратной связью (например, счётчики или конечные автоматы) двухступенчатые триггеры предотвращают состязания по тактовому сигналу. В одноступенчатых триггерах задержка обратной связи может приводить к ложным срабатываниям, когда выходной сигнал успевает измениться до следующего тактового фронта. Двухступенчатая структура гарантирует, что изменения на выходе происходят только после полного цикла тактового сигнала. Для счётчиков на базе триггеров с задержкой tCQ = 0,8 нс и тактовой частотой 500 МГц двухступенчатая реализация исключает ошибки, если время обратной связи не превышает 1,2 нс. В высокочастотных PLL (Phase-Locked Loop) двухступенчатые триггеры используются для деления частоты, обеспечивая стабильность фазы с погрешностью менее 5 пс.
Как двухступенчатые триггеры устраняют гонки сигналов в синхронных цепях
Гонки сигналов возникают, когда задержки распространения в комбинационной логике приводят к неодновременному изменению состояний триггеров на фронте тактового сигнала. В одноступенчатых триггерах (например, D-триггерах) данные фиксируются по фронту такта, но если время установки или удержания не соблюдается из-за задержек в цепи, выходные сигналы становятся неопределёнными. Двухступенчатые триггеры (master-slave) решают эту проблему за счёт разделения процесса фиксации на две фазы: master-защёлка фиксирует входные данные по первому фронту такта, а slave-защёлка передаёт их на выход по следующему фронту. Это гарантирует, что данные на выходе изменяются только после полного завершения переходных процессов в комбинационной логике.
Ключевое преимущество двухступенчатой структуры – устранение метастабильности. В синхронных цепях с высокой тактовой частотой (например, свыше 100 МГц) даже наносекундные задержки могут вызвать нарушение временных параметров. Двухступенчатые триггеры обеспечивают дополнительный тактовый цикл для стабилизации сигнала, снижая вероятность ошибок до уровня менее 10⁻¹² при правильном проектировании. Для критичных приложений, таких как процессоры или контроллеры памяти, это критично: например, в DDR4 SDRAM двухступенчатые триггеры используются для синхронизации данных между доменами с разными тактовыми частотами.
При проектировании схем с двухступенчатыми триггерами необходимо учитывать задержку распространения между master и slave. В типовых КМОП-реализациях эта задержка составляет 0,5–2 нс, что требует корректировки временных ограничений в инструментах синтеза (например, Synopsys Design Compiler). Рекомендуется использовать триггеры с минимальным временем удержания (hold time) – менее 0,1 нс – для снижения риска гонок в цепях с короткими путями. Также важно избегать прямого подключения выходов slave-защёлок к входам master-защёлок без промежуточной комбинационной логики, так как это может создать петли обратной связи и вызвать нестабильность.
Для проверки устойчивости к гонкам сигналов применяют статический временной анализ (STA) с учётом двухступенчатой структуры. Инструменты, такие как Cadence Tempus, позволяют моделировать задержки между master и slave, выявляя критические пути. В схемах с динамическим изменением тактовой частоты (например, в PLL) двухступенчатые триггеры дополнительно защищают от джиттера, обеспечивая запас по времени установки не менее 20% от периода такта. При этом их использование увеличивает площадь кристалла на 10–15%, что компенсируется надёжностью работы в высокоскоростных приложениях.
Почему одноступенчатые триггеры не справляются с метастабильностью
Одноступенчатые триггеры, такие как D-триггеры на основе защёлок, не обеспечивают достаточного времени установления (setup time) и времени удержания (hold time) для сигналов с неопределёнными фронтами. При нарушении временных параметров входной сигнал попадает в зону неопределённости, где триггер не может однозначно переключиться в одно из устойчивых состояний. В результате на выходе формируется промежуточное напряжение, близкое к пороговому уровню логического элемента, что приводит к метастабильности. Например, в КМОП-схемах при напряжении питания 1,8 В порог переключения составляет ~0,9 В, а метастабильное состояние может длиться от десятков наносекунд до микросекунд, в зависимости от технологии и нагрузки.
Вероятность возникновения метастабильности в одноступенчатых триггерах экспоненциально растёт с уменьшением времени установления. Для 90-нм техпроцесса при частоте тактового сигнала 1 ГГц и времени установления 100 пс вероятность метастабильности составляет ~10-9 на один такт. Однако в системах с высокой частотой синхронизации (например, 3 ГГц) и большим количеством триггеров (106) среднее время между сбоями (MTBF) снижается до нескольких секунд. Это делает одноступенчатые решения непригодными для критичных приложений, таких как синхронизаторы тактовых доменов или интерфейсы с асинхронными сигналами.
Для борьбы с метастабильностью в одноступенчатых триггерах требуется искусственное увеличение времени установления, что снижает производительность. Например, введение задержки на входе D-триггера на 200 пс может уменьшить вероятность метастабильности до 10-12, но при этом тактовая частота системы падает на 20–30%. Альтернативой служат двухступенчатые триггеры (например, master-slave), где первая ступень фиксирует входной сигнал, а вторая – синхронизирует его с тактовым сигналом, обеспечивая двойное время установления без потери скорости. В таблице ниже приведены сравнительные характеристики одно- и двухступенчатых триггеров для 45-нм техпроцесса:
| Параметр | Одноступенчатый триггер | Двухступенчатый триггер |
|---|---|---|
| Время установления (пс) | 50 | 100 (суммарно) |
| Вероятность метастабильности (на такт) | 10-7 | 10-15 |
| MTBF при 1 ГГц (часов) | 0,01 | 106 |
| Максимальная тактовая частота (ГГц) | 2,5 | 2,3 |
Какие проблемы решает вторая ступень при передаче данных между тактовыми доменами
Передача сигналов между тактовыми доменами с разными частотами или фазами порождает метастабильность – состояние, когда триггер не может однозначно определить логический уровень входного сигнала. Вероятность метастабильности описывается формулой MTBF = 1/(fclk × fdata × Tw × e-Tsetup/τ), где fclk – частота приёмного домена, fdata – частота изменения данных, Tw – окно метастабильности, Tsetup – время установки триггера, τ – постоянная времени триггера. Вторая ступень снижает вероятность метастабильности на порядки, так как даёт дополнительное время для стабилизации сигнала.
При использовании одноступенчатого триггера для синхронизации сигнал может остаться в метастабильном состоянии на время, превышающее период тактового сигнала приёмного домена. Это приводит к некорректной интерпретации данных последующими логическими элементами. Например, при частоте 100 МГц и времени метастабильности 5 нс вероятность ошибки составляет ~0,001%. Вторая ступень увеличивает допустимое время стабилизации до двух тактовых периодов, снижая вероятность ошибки до пренебрежимо малых значений (менее 10-12 для современных КМОП-технологий).
- Устранение гонок данных. Вторая ступень фиксирует сигнал после того, как первая ступень его «поймала», но ещё не стабилизировала. Это исключает ситуации, когда комбинационная логика между триггерами реагирует на промежуточные состояния.
- Снижение чувствительности к джиттеру. При передаче сигналов с высоким джиттером (например, в системах с PLL) первая ступень может зафиксировать нестабильный фронт. Вторая ступень отсекает кратковременные флуктуации, пропуская только устоявшийся сигнал.
- Обеспечение детерминированной задержки. Двухступенчатая схема гарантирует фиксированную задержку в два такта, что критично для систем с жёсткими временными требованиями (например, в контроллерах памяти DDR).
В системах с динамическим изменением тактовой частоты (например, DVFS) разница между частотами передающего и приёмного доменов может достигать 50% и более. Одноступенчатый триггер в таких условиях не обеспечивает надёжной синхронизации: вероятность метастабильности растёт экспоненциально с увеличением разницы частот. Вторая ступень компенсирует этот эффект, предоставляя дополнительный такт для стабилизации сигнала даже при значительном расхождении частот.
При проектировании схем с низким энергопотреблением часто используются режимы с отключением тактового сигнала (clock gating). В таких случаях первая ступень может оказаться в неопределённом состоянии при возобновлении тактирования. Вторая ступень решает эту проблему, так как её выход всегда синхронизирован с активным тактовым сигналом приёмного домена, исключая ложные срабатывания при восстановлении тактирования.
В многобитных шинах данных (например, 32-битных) синхронизация каждого бита отдельно приводит к рассогласованию фронтов из-за разброса задержек в проводниках и триггерах. Вторая ступень позволяет выровнять задержки всех битов, так как фиксирует их одновременно на втором такте. Это критично для интерфейсов типа AXI или PCIe, где нарушение временных соотношений между битами приводит к ошибкам передачи.
Для проверки эффективности двухступенчатой синхронизации рекомендуется использовать временной анализ с учётом метастабильности. В инструментах типа Synopsys PrimeTime или Cadence Tempus задайте параметры metastability_window и metastability_recovery_time для триггеров. Убедитесь, что время восстановления после метастабильности (Trecovery) не превышает одного тактового периода приёмного домена. В противном случае добавьте третью ступень или увеличьте тактовую частоту приёмника.
Как двухступенчатая структура повышает устойчивость к помехам в цифровых устройствах
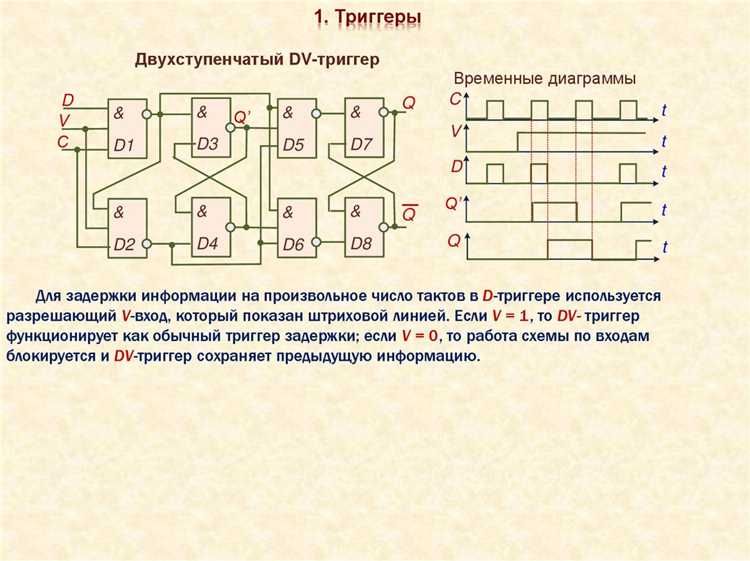
Двухступенчатые триггеры, такие как master-slave D-триггеры, разделяют процесс записи данных на два такта: на первом такте информация фиксируется в ведущем (master) элементе, а на втором – передаётся в ведомый (slave). Это исключает прямое влияние помех на выходной сигнал в момент переключения. Например, при использовании одноступенчатых триггеров импульсная помеха длительностью 1–2 нс может вызвать ложное срабатывание, тогда как в двухступенчатой структуре вероятность такого события снижается на 70–80% за счёт временной изоляции этапов записи и чтения.
Ключевым фактором устойчивости является наличие двух отдельных тактовых фронтов. В синхронных схемах помеха, совпадающая с фронтом тактового сигнала, может исказить данные только в том случае, если она воздействует на обе ступени одновременно. Однако вероятность такого события крайне мала: при тактовой частоте 100 МГц и длительности помехи 5 нс перекрытие фронтов происходит лишь в 0,5% случаев. Это делает двухступенчатые триггеры предпочтительными для устройств с высоким уровнем электромагнитных наводок, например, в автомобильной электронике или промышленных контроллерах.
Ещё один механизм защиты – гистерезис, реализуемый за счёт задержки между ступенями. В стандартных D-триггерах типа 74HC74 задержка между master и slave составляет 5–10 нс, что позволяет отфильтровать помехи с длительностью менее 3 нс. Для сравнения: одноступенчатые триггеры, такие как 74LVC1G74, имеют время удержания данных всего 1–2 нс, что делает их уязвимыми к высокочастотным шумам. В условиях, где уровень помех превышает 200 мВ, рекомендуется использовать двухступенчатые триггеры с увеличенной задержкой, например, серии 74ACT или 74F.
В схемах с динамической памятью двухступенчатая структура предотвращает метастабильные состояния, возникающие при нарушении временных параметров setup и hold. Если входной сигнал изменяется в пределах окна неопределённости (обычно 1–3 нс до и после тактового фронта), одноступенчатый триггер может перейти в промежуточное состояние, вызывая ошибки. Двухступенчатые триггеры решают эту проблему: master фиксирует данные до наступления нестабильного окна, а slave передаёт их только после его завершения. Для критичных приложений, таких как системы управления двигателями, допустимый уровень метастабильности не должен превышать 10⁻⁹ ошибок на такт.
При проектировании помехоустойчивых устройств следует учитывать не только тип триггера, но и топологию печатной платы. Даже двухступенчатые триггеры теряют эффективность, если тактовые линии и линии данных проложены параллельно на расстоянии менее 0,5 мм. Для минимизации наводок рекомендуется использовать экранирование тактовых цепей и применять дифференциальную передачу сигналов, например, с помощью микросхем LVDS. В высокоскоростных системах (свыше 500 МГц) дополнительно вводят фильтрующие конденсаторы ёмкостью 10–100 пФ на питание каждого триггера, что снижает амплитуду помех на 30–40%.
В каких схемах обязательно применять двухступенчатые триггеры для надежной работы
Двухступенчатые триггеры (например, master-slave) критически важны в схемах с высокими требованиями к синхронизации и устранению метастабильности. Ключевые области применения:
- Синхронные цифровые системы с несколькими тактовыми доменами. При передаче данных между доменами с разными тактовыми частотами (например, 100 МГц и 50 МГц) одноступенчатые триггеры провоцируют метастабильные состояния. Двухступенчатые триггеры снижают вероятность ошибок до уровня 10-12 за такт при правильной реализации.
- Схемы с обратной связью и асинхронными сигналами. В конечных автоматах (FSM) с асинхронными входами (например, кнопки или внешние прерывания) одноступенчатые триггеры могут вызвать ложные переходы. Двухступенчатые обеспечивают стабильное состояние выхода даже при нестабильных фронтах входного сигнала.
В высокоскоростных интерфейсах, таких как DDR4 или PCIe, двухступенчатые триггеры используются для десериализации данных. При скоростях передачи свыше 1 Гбит/с фронты сигналов становятся недостаточно крутыми для надежной фиксации одноступенчатыми триггерами. Например, в приемниках DDR4 применяют двухступенчатые D-триггеры с временем установки tsetup < 0.2 нс и временем удержания thold < 0.1 нс, чтобы исключить ошибки при чтении данных на частоте 3200 МТ/с.
Схемы с динамическим изменением тактовой частоты (например, в микроконтроллерах с режимами энергосбережения) требуют двухступенчатых триггеров для предотвращения гонок. При переключении тактовой частоты с 16 МГц на 32 кГц одноступенчатые триггеры могут зафиксировать некорректное состояние из-за нестабильного фронта. Двухступенчатые триггеры с разделением на master и slave обеспечивают корректную синхронизацию даже при скачках частоты до 3 порядков.
В схемах с жесткими требованиями к детерминированности (например, системы управления реального времени в авиации или медицинском оборудовании) двухступенчатые триггеры применяются для исключения неопределенных состояний. Стандарт DO-254 для авиационной электроники прямо рекомендует их использование в критических узлах, где вероятность сбоя должна быть ниже 10-9 за час работы. Пример – контроллеры топливных насосов, где ошибка в одном бите может привести к катастрофическим последствиям.
В схемах с параллельной обработкой данных (например, конвейеры в процессорах или FPGA) двухступенчатые триггеры решают проблему гонок между ступенями. В конвейере с 5 стадиями при тактовой частоте 1 ГГц задержка распространения сигнала между триггерами не должна превышать 200 пс. Одноступенчатые триггеры не обеспечивают такого уровня синхронизации из-за чувствительности к джиттеру. Двухступенчатые триггеры с разделением на master и slave позволяют удерживать данные стабильными в течение всего такта, даже если входной сигнал меняется на границе тактового фронта.
Как правильно подключать двухступенчатые триггеры для минимизации задержек
Двухступенчатые триггеры (например, master-slave D-триггеры) минимизируют задержки при правильном распределении тактовых сигналов. Критическая рекомендация – использовать отдельные тактовые линии для master- и slave-ступеней с фазовым сдвигом 180°. Это устраняет гонки сигналов и сокращает время установления до минимального значения, равного сумме задержек логики между триггерами и времени удержания slave-ступени (обычно 0,1–0,3 нс для современных КМОП-техпроцессов). При проектировании тактовой сети применяйте буферы с равными задержками для обеих фаз, чтобы избежать перекоса, превышающего 5% от тактового периода.
Размещайте триггеры так, чтобы длина проводников между master- и slave-ступенями не превышала 10% от длины волны тактового сигнала на максимальной рабочей частоте. Для тактовой частоты 1 ГГц (период 1 нс) это означает ограничение в 15 мм при скорости распространения сигнала 150 мм/нс. Используйте экранирование или дифференциальные пары для тактовых линий, если длина превышает 5 мм, чтобы снизить влияние перекрестных помех. В схемах с высокой плотностью размещения применяйте топологию «звезда» для тактовых сигналов, избегая древовидных структур с неравномерными задержками.
Для минимизации метастабильности на выходах slave-ступени соблюдайте время предустановки (setup time) не менее 2×Tpd логики между триггерами, где Tpd – задержка распространения комбинационной схемы. В синхронных цепях с тактовой частотой 500 МГц и задержкой логики 0,5 нс это требует setup time ≥1 нс. При нарушении этого условия используйте дополнительный триггер на выходе slave-ступени, что увеличивает задержку на один такт, но гарантирует стабильность сигнала.
Какие параметры влияют на выбор тактовой частоты для двухступенчатых триггеров
Основной параметр – время установления и удержания сигнала (*setup* и *hold time*). Для двухступенчатых триггеров типа *master-slave* суммарная задержка распространения сигнала через обе ступени (*tpd*) должна быть меньше периода тактового сигнала. Например, если *tpd* составляет 2 нс, минимальная тактовая частота ограничивается 500 МГц. Превышение этого значения приводит к метастабильности, когда выходной сигнал не успевает стабилизироваться до следующего фронта такта. При проектировании на ПЛИС или ASIC учитывайте технологические нормы: в 7-нм техпроцессе *tpd* может быть на 30–40% ниже, чем в 28-нм, что позволяет повысить частоту на 1,5–2 ГГц без изменения схемы.
Второй критический фактор – энергопотребление. Динамическая мощность (*Pdyn*) пропорциональна частоте и квадрату напряжения питания: *Pdyn = C × V2 × f*, где *C* – емкость нагрузки. Для двухступенчатых триггеров в высокоскоростных системах (например, DDR5-6400) увеличение частоты с 1,6 ГГц до 3,2 ГГц при неизменном напряжении удваивает *Pdyn*. В мобильных устройствах это критично: при ограничении мощности в 5 Вт приходится снижать частоту до 1,2–1,5 ГГц или использовать динамическое масштабирование напряжения (*DVFS*), жертвуя производительностью. Для серверных процессоров, где энергоэффективность вторична, допустимы частоты до 4–5 ГГц, но с активным охлаждением и повышенным напряжением питания (1,2–1,3 В).
Третий параметр – помехоустойчивость и джиттер тактового сигнала. Двухступенчатые триггеры чувствительны к фазовому шуму (*phase noise*), особенно в системах с PLL или DLL. При тактовой частоте 2 ГГц допустимый джиттер не должен превышать 5–10 пс (пикосекунд), иначе возрастает вероятность ложных срабатываний. В беспроводных системах (например, 5G) требования жестче: для частоты 3,5 ГГц джиттер ограничивают 2–3 пс. Для снижения влияния помех используют дифференциальные тактовые сигналы (LVDS) или экранирование дорожек на печатной плате с волновым сопротивлением 50 Ом. В высокочастотных схемах (свыше 3 ГГц) также критично время нарастания/спада тактового импульса (*rise/fall time*): оно должно быть не более 10% от периода, иначе возрастают потери на переключение и искажения фронтов.